感知器定义
所谓感知器,就是二类分类的线性分类模型,其输入为样本的特征向量,输出为样本的类别,取+1和-1二值,即通过某样本的特征,就可以准确判断该样本属于哪一类。顾名思义,感知器能够解决的问题首先要求特征空间是线性可分的,再者是二类分类,即将样本分为{+1,-1}两类。
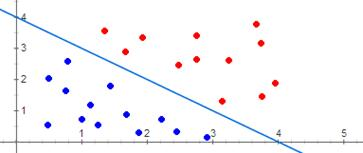
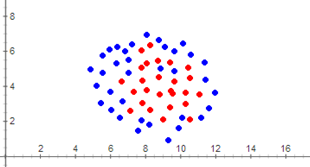
从比较学术的层面来说,由输入空间到输出空间的函数:f(x)=w.x+b,w和b为感知器参数,w为权值(weight),b为偏置(bias)。感知器的定义中,线性方程w.x+b=0对应于问题空间中的一个超平面s,位于这个超平面两侧的样本分别被归为两类,例如下图中,红色作为一类,蓝色作为另一类,它们的特征很简单,就是它们的坐标。
作为监督学习的一种方法,感知器学习由训练样本集合X求得感知器模型,即求得模型参数w和b,这里x和y分别是特征向量和类别(也称为目标)。基于此,感知器模型可以对新的的输入样本进行分类。
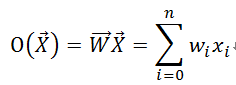
假设使用Xi来表示某个样本,xi表示样本Xi其中的一个分量,一共有n给维度,则可得:

感知器的模型也可以表示为:
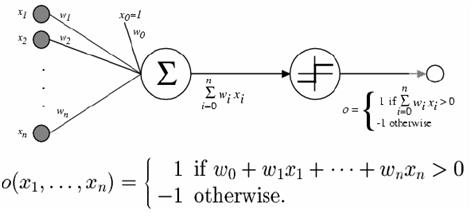
权值w表示该感知器的参数:

感知器对应于一个n维空间中的超平面:
它能够分类两类样本,对应超平面一侧的输入样本输出1,对应另一侧样本输出为-1。训练过程就是调整权值w,使得感知器对于两类样本分别输出1和-1.
也可将感知器推广成为线性单元,进而拟合直线进行线性回归处理:
感知器训练
假设有一个感知器f(x)和训练样本集合X,我们一般通过训练样本X来调整感知器f(x)中的参数权值W。具体的做法是设计目标函数,通过梯度下降法来估计感知器参数值。
平方误差准则:衡量在当前权值向量W下感知器相对于训练样本的训练误差为:
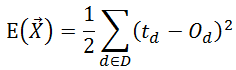
其中D表示训练样本集合,d是训练样本集合中的一个样本,td是训练样本d的目标输出(比如-1或者1),Od是训练样本d在感知器中实际输出。E是目标输出td和实际输出Od的差的平方在所有训练样本上求和的1/2倍。加1/2是为了推导更加简洁,与求导后平方项产生因子2抵消。
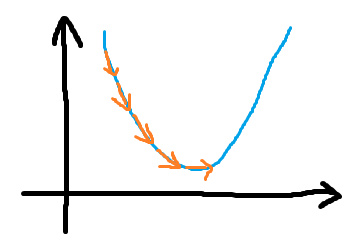
E是关于W的函数,要使得E变得最小,必须找到最优解W。我们从任意的初始权值向量W0开始,然后以很小的步长反复修改这个权值向量W,而每一步修改都能是误差E减小,直到找到全局最小值点W,一个合理的选择就是找到目前最陡峭的函数E下降方向,也就是E的梯度负方向:
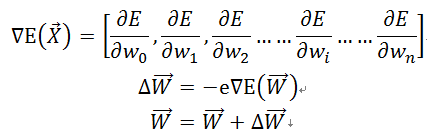
其中e为梯度的下降步长,写成分量形式为:
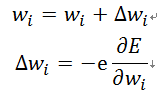
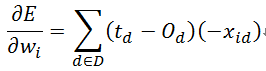
推导到这里,关键是如何计算E对wi的偏导数,则有:

其中xid表示训练样本d的一个输入分量xi,因为:

则有:
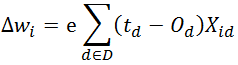
在每次迭代过程中按照关于E的梯度来改变权值,迭代完成一轮所有训练样本时,这些权值更新的序列给出了对原误差函数E的标准梯度下降的一个合理近似:
感知器是一个简单的二类分类的线性分类模型,要求我们的样本时线性可分的,什么样的样本时线性可分的呢?举例来说,在二维平面中,可以使用一条直线将+1类和-1类完美分开,那么这个样本空间就是线性可分的。如下图中的样本就是线性不可分的,感知器就不能处理这种情况。因此,感知器的所有问题都基于一个前提,就是问题空间线性可分。
实验
%感知器分类器算法
clear
%x1样本初始化 一共45个点
x1(1,1)=5.1418; x1(1,2)=0.5950;
x1(2,1)=5.5519; x1(2,2)=3.5091;
x1(3,1)=5.3836; x1(3,2)=2.8033;
x1(4,1)=3.2419; x1(4,2)=3.7278;
x1(5,1)=4.4427; x1(5,2)=3.8981;
x1(6,1)=4.9111; x1(6,2)=2.8710;
x1(7,1)=2.9259; x1(7,2)=3.4879;
x1(8,1)=4.2018; x1(8,2)=2.4973;
x1(9,1)=4.7629; x1(9,2)=2.5163;
x1(10,1)=2.7118; x1(10,2)=2.4264;
x1(11,1)=3.0470; x1(11,2)=1.5699;
x1(12,1)=4.7782; x1(12,2)=3.3504;
x1(13,1)=3.9937; x1(13,2)=4.8529;
x1(14,1)=4.5245; x1(14,2)=2.1322;
x1(15,1)=5.3643; x1(15,2)=2.2477;
x1(16,1)=4.4820; x1(16,2)=4.0843;
x1(17,1)=3.2129; x1(17,2)=3.0592;
x1(18,1)=4.7520; x1(18,2)=5.3119;
x1(19,1)=3.8331; x1(19,2)=0.4484;
x1(20,1)=3.1838; x1(20,2)=1.4494;
x1(21,1)=6.0941; x1(21,2)=1.8544;
x1(22,1)=4.0802; x1(22,2)=6.2646;
x1(23,1)=3.0627; x1(23,2)=3.6474;
x1(24,1)=4.6357; x1(24,2)=2.3344;
x1(25,1)=5.6820; x1(25,2)=3.0450;
x1(26,1)=4.5936; x1(26,2)=2.5265;
x1(27,1)=4.7902; x1(27,2)=4.4668;
x1(28,1)=4.1053; x1(28,2)=3.0274;
x1(29,1)=3.8414; x1(29,2)=4.2269;
x1(30,1)=4.8709; x1(30,2)=4.0535;
x1(31,1)=3.8052; x1(31,2)=2.6531;
x1(32,1)=4.0755; x1(32,2)=2.8295;
x1(33,1)=3.4734; x1(33,2)=3.1919;
x1(34,1)=3.3145; x1(34,2)=1.8009;
x1(35,1)=3.7316; x1(35,2)=2.6421;
x1(36,1)=2.8117; x1(36,2)=2.8658;
x1(37,1)=4.2486; x1(37,2)=1.4651;
x1(39,1)=3.9590; x1(39,2)=1.3024;
x1(40,1)=1.7524; x1(40,2)=1.9339;
x1(41,1)=3.4892; x1(41,2)=1.2457;
x1(42,1)=4.2492; x1(42,2)=4.5982;
x1(43,1)=4.3692; x1(43,2)=1.9794;
x1(44,1)=4.1792; x1(44,2)=0.4113;
x1(45,1)=3.9627; x1(45,2)=4.2198;
%x2样本初始化 一共55个点
x2(1,1)=9.7302; x2(1,2)=5.5080;
x2(2,1)=8.8067; x2(2,2)=5.1319;
x2(3,1)=8.1664; x2(3,2)=5.2801;
x2(4,1)=6.9686; x2(4,2)=4.0172;
x2(5,1)=7.0973; x2(5,2)=4.0559;
x2(6,1)=9.4755; x2(6,2)=4.9869;
x2(7,1)=9.3809; x2(7,2)=5.3543;
x2(8,1)=7.2704; x2(8,2)=4.1053;
x2(9,1)=8.9674; x2(9,2)=5.8121;
x2(10,1)=8.2606; x2(10,2)=5.1095;
x2(11,1)=7.5518; x2(11,2)=7.7316;
x2(12,1)=7.0016; x2(12,2)=5.4111;
x2(13,1)=8.3442; x2(13,2)=3.6931;
x2(14,1)=5.8173; x2(14,2)=5.3838;
x2(15,1)=6.1123; x2(15,2)=5.4995;
x2(16,1)=10.4188;x2(16,2)=4.4892;
x2(17,1)=7.9136; x2(17,2)=5.2349;
x2(18,1)=11.1547;x2(18,2)=4.4022;
x2(19,1)=7.7080; x2(19,2)=5.0208;
x2(20,1)=8.2079; x2(20,2)=5.4194;
x2(21,1)=9.1078; x2(21,2)=6.1911;
x2(22,1)=7.7857; x2(22,2)=5.7712;
x2(23,1)=7.3740; x2(23,2)=2.3558;
x2(24,1)=9.7184; x2(24,2)=5.2854;
x2(25,1)=6.9559; x2(25,2)=5.8261;
x2(26,1)=8.9691; x2(26,2)=4.9919;
x2(27,1)=7.3872; x2(27,2)=5.8584;
x2(28,1)=8.8922; x2(28,2)=5.7748;
x2(29,1)=9.0175; x2(29,2)=6.3059;
x2(30,1)=7.0041; x2(30,2)=6.2315;
x2(31,1)=8.6396; x2(31,2)=5.9586;
x2(32,1)=9.2394; x2(32,2)=3.3455;
x2(33,1)=6.7376; x2(33,2)=4.0096;
x2(34,1)=8.4345; x2(34,2)=5.6852;
x2(35,1)=7.9559; x2(35,2)=4.0251;
x2(36,1)=6.5268; x2(36,2)=4.3933;
x2(37,1)=7.6699; x2(37,2)=5.6868;
x2(38,1)=7.8075; x2(38,2)=5.0200;
x2(39,1)=6.6997; x2(39,2)=6.0638;
x2(40,1)=5.6549; x2(40,2)=3.6590;
x2(41,1)=6.9086; x2(41,2)=5.4795;
x2(42,1)=7.9933; x2(42,2)=3.3660;
x2(43,1)=5.9318; x2(43,2)=3.5573;
x2(44,1)=9.5157; x2(44,2)=5.2938;
x2(45,1)=7.2795; x2(45,2)=4.8596;
x2(46,1)=5.5233; x2(46,2)=3.8697;
x2(47,1)=8.1331; x2(47,2)=4.7075;
x2(48,1)=9.7851; x2(48,2)=4.4175;
x2(49,1)=8.0636; x2(49,2)=4.1037;
x2(50,1)=8.1944; x2(50,2)=5.2486;
x2(51,1)=7.9677; x2(51,2)=3.5103;
x2(52,1)=8.2083; x2(52,2)=5.3135;
x2(53,1)=9.0586; x2(53,2)=2.9749;
x2(54,1)=8.2188; x2(54,2)=5.5290;
x2(55,1)=8.9064; x2(55,2)=5.3435;
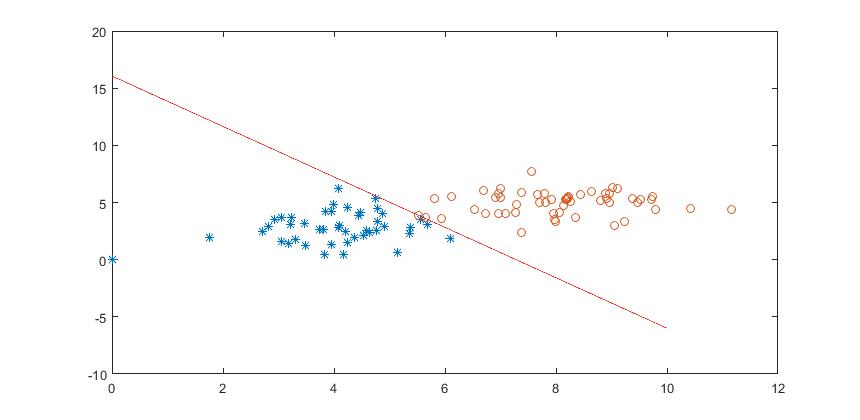
plot(x1(:,1),x1(:,2),'*',x2(:,1),x2(:,2),'o');
x=[x1;x2]; %创建x设计矩阵 100行2列 前45行是x1 后55行是x2
w0=0.00001; w1=0.00001; w2=0.00001; %权值初始化
n=0.0005; %梯度下降幅度
y1=-ones(45,1); %y1类的期望输出为-1
y2=ones(55,1); %y2类的期望输出为1
y=[y1;y2]; %目标向量
for k=1:1000 %迭代1000次
for i=1:100
o=w0+w1*x(i,1)+w2*x(i,2);
dlta=n*(y(i)-o);
w0=w0+dlta; %更新权值
w1=w1+dlta*x(i,1);
w2=w2+dlta*x(i,2);
end
end
w0
w1
w2
xx=linspace(0,10,5000);
yy=-w1/w2*xx-w0/w2;
hold on,plot(xx,yy,'r');
程序运行结果: